一、Modbus协议简介:
1.modbus介绍:
Modbus是一种串行通信协议,是Modicon公司(现在的施耐德电气 Schneider Electric)于1979年为使用可编程逻辑控制器(PLC)通信而发表。Modbus已经成为工业领域通信协议的业界标准(De facto),并且现在是工业电子设备之间常用的连接方式。
2.Modbus分类
Modbus协议分为三种,包括:
Modbus-RTU
Modbus-ASCII
Modbus-TCP
这三种协议中我们最常使用的是ModBus-RTU形式,本文也主要以该中进行讲解
3.Modbus通信过程:
在通信上我们可将其分为硬件层和软件层两部分:
1)硬件层:RS232、RS485 、CAN等 。主要解决硬件传输问题,解决如何传输0与1的问题(物理上以什么样的电平、多少伏电压传输,仪表可以测到这个电压,还有以双绞线还是什么线传输)。【形象来说硬件层就是我们的交通道路】
2)软件层:怎么传数据,Modbus、TCP/IP【形象来说软件层就是我们的交通灯】对传输的数据有着一定的约束作用。
3.1传输形式:
1)单工模式:只有一个方向可以进行读和写
2)半双工:两个方向都可以进行读和写,但同一时刻只能一边进行
3)全双工:两个方向读和写可以同时进行
ModBus是一种半双工的通信形式,更多的作为主从模式使用。也就是说在整个系统中,只有一个主机,其余的全都是从机(从机的的数量也有一定的限制),系统中的从机不能主动发送信息给主机。
3.2硬件实现:
主从模式:
(3)系统上电之后,默认状态,主机,从机都是在监听状态;
(4)主机与从机之间的通信,只能由主机发起;
主机要建立起一次通信,要满足以下要求:
(1)主机要将自己置为发送状态;
(2)主机要按照预先约定好的格式(比如MODBUS协议格式)发送寻址数据帧,发完之后立刻把自己转回接收状态;
(3)寻址完成之后,目标从机要返回给我消息,才能算这次通信成功;
3.3软件实现
(1).MODBUS是主从模式:
整个系统只能有一个主机,每个从机都有唯一的地址(0-247),0号地址是广播地址,发送给所有的从机。0号地址寻址,所有从机不回应,否则会造成消息错误。
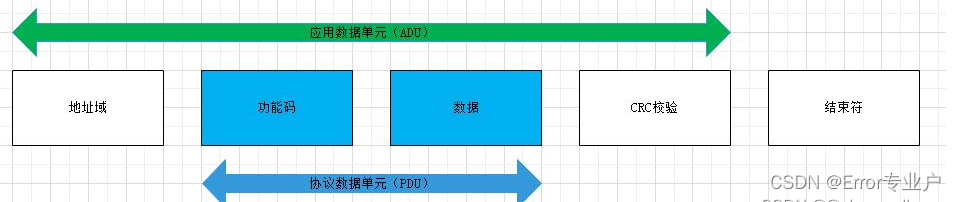
(2).MODBUS主机寻址帧格式:
RTU方式:也叫16进制方式,或者2进制方式
比如:0x03: 0000 0011
(3)ASC方式:字符方式(方便调试)
比如:0x03–> 转换成字符’0’与字符’3’再发送出去;那么就会发
字符’0’(ASCII码是0x30)的2进制0011 0000 + 字符’3’(ASCII码0x33)的2进制 0011 0011,最终发送的就是:0011 0000 0011 0011
4.CRC校验
4.1CRC定义
CRC即循环冗余校验码,是数据通信领域中最常用的一种查错校验码,其特征是信息字段和校验字段的长度可以任意选定。循环冗余检查(CRC)是一种数据传输检错功能,对数据进行多项式计算,并将得到的结果附在帧的后面,接收设备也执行类似的算法,以保证数据传输的正确性和完整性。
4.2CRC原理
其根本思想就是先在要发送的帧后面附加一个数(这个就是用来校验的校验码,但要注意,这里的数也是二进制序列的,下同),生成一个新帧发送给接收端。当然,这个附加的数不是随意的,它要使所生成的新帧能与发送端和接收端共同选定的某个特定数整除(注意,这里不是直接采用二进制除法,而是采用一种称之为“模2除法”)。到达接收端后,再把接收到的新帧除以(同样采用“模2除法”)这个选定的除数。因为在发送端发送数据帧之前就已通过附加一个数,做了“去余”处理(也就已经能整除了),所以结果应该是没有余数。如果有余数,则表明该帧在传输过程中出现了差错
二、Modbus代码实现
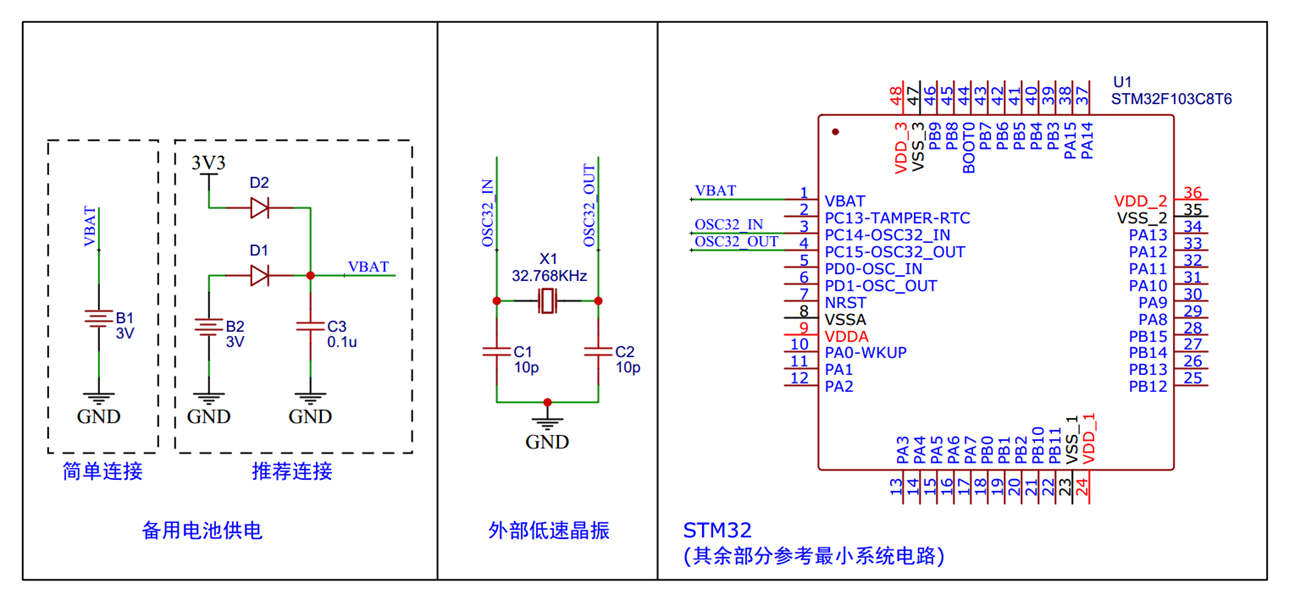
利用STM32串口进行经过485芯片进行Modbus通信
1.初始化:
#include "protocol.h"
#include "mcheck.h"
#include "mport.h"
//MODBUS 接口层驱动代码
//串口1中断服务函数
//如果是通过其他方式接受,请按要求实现数据存储
//将一帧数据完整的存储到m_ctrl_dev.rxbuf里面,并将帧数据长度存储在m_ctrl_dev.rxlen里面
void USART1_IRQHandler(void)
{
u8 res;
if(USART1->SR&(1<<5)) //接收到数据
{
res=USART1->DR;
if(m_ctrl_dev.frameok==0) //接收未完成
{
m_ctrl_dev.rxbuf[m_ctrl_dev.rxlen]=res;
m_ctrl_dev.rxlen++;
if(m_ctrl_dev.rxlen>(M_MAX_FRAME_LENGTH-1))m_ctrl_dev.rxlen=0;//接收数据错误,重新开始接收
}
}else if(USART1->SR&(1<<4)) //空闲中断
{
res=USART1->DR; //读DR,清除IDLE位
m_ctrl_dev.frameok=1; //标记完成一帧数据接收
}
}
//初始化接口
//这里我们使用串口1,得根据自己的需要修改
//串口1,我们利用空闲中断,做帧结束判断,如果其他接口,没有类似空闲状态监测电话
//必须自己实现帧数据截取(可以用超时法)
//pclk2:PCLK2时钟;
//bound:波特率
void mp_init(u32 pclk2,u32 bound)
{
RCC->APB2ENR|=1<<2; //使能PORTA口时钟
RCC->APB2ENR|=1<<14; //使能串口时钟
GPIOA->CRH&=0XFFFFF00F;//IO状态设置
GPIOA->CRH|=0X000008B0;//IO状态设置
RCC->APB2RSTR|=1<<14; //复位串口1
RCC->APB2RSTR&=~(1<<14);//停止复位
//波特率设置
USART1->BRR=(pclk2*1000000)/bound;
USART1->CR1|=0X200C; //1位停止,无校验位
USART1->CR1|=1<<4; //开启串口总线空闲中断.
//使能接收中断
USART1->CR1|=1<<5; //接收缓冲区非空中断使能
MY_NVIC_Init(3,3,USART1_IRQn,2);//组2,最低优先级
}
//发送指定长度的数据
//buf:要发送的数据缓冲区首地址
//len:要发送的数据长度
void mp_send_data(u8* buf, u16 len)
{
u16 i=0;
for(i=0;i<len;i++)
{
while((USART1->SR&0X40)==0); //等待上一次串口数据发送完成
USART1->DR=buf[i]; //写DR,串口1将发送数据
}
}
2.Modbus协议驱动代码:
#include "protocol.h"
#include "malloc.h"
//MODBUS 协议层驱动代码
m_protocol_dev_typedef m_ctrl_dev; //定义modbus控制器
//解析一帧数据,解析结果存储在fx里面
//注意:本函数会用到malloc给fx数据指针申请内存,后续用完fx,一定要释放内存!!
//否则会引起内存泄露!!!
//fx:帧指针
//返回值:解析结果,0,OK,其他,错误代码。
m_result mb_unpack_frame(m_frame_typedef *fx)
{
u16 rxchkval=0; //接收到的校验值
u16 calchkval=0; //计算得到的校验值
u8 datalen=0; //有效数据长度
fx->datalen=0; //数据长度清零
if(m_ctrl_dev.rxlen>M_MAX_FRAME_LENGTH||m_ctrl_dev.rxlen<M_MIN_FRAME_LENGTH)
{
m_ctrl_dev.rxlen=0; //清除rxlen
m_ctrl_dev.frameok=0; //清除framok标记,以便下次可以正常接收
return MR_FRAME_FORMAT_ERR;//帧格式错误
}
datalen=m_ctrl_dev.rxbuf[3];
switch(m_ctrl_dev.checkmode)
{
case M_FRAME_CHECK_SUM: //校验和
calchkval=mc_check_sum(m_ctrl_dev.rxbuf,datalen+4);
rxchkval=m_ctrl_dev.rxbuf[datalen+4];
break;
case M_FRAME_CHECK_XOR: //异或校验
calchkval=mc_check_xor(m_ctrl_dev.rxbuf,datalen+4);
rxchkval=m_ctrl_dev.rxbuf[datalen+4];
break;
case M_FRAME_CHECK_CRC8: //CRC8校验
calchkval=mc_check_crc8(m_ctrl_dev.rxbuf,datalen+4);
rxchkval=m_ctrl_dev.rxbuf[datalen+4];
break;
case M_FRAME_CHECK_CRC16: //CRC16校验
calchkval=mc_check_crc16(m_ctrl_dev.rxbuf,datalen+4);
rxchkval=((u16)m_ctrl_dev.rxbuf[datalen+4]<<8)+m_ctrl_dev.rxbuf[datalen+5];
break;
}
m_ctrl_dev.rxlen=0; //清除rxlen
m_ctrl_dev.frameok=0; //清除framok标记,以便下次可以正常接收
if(calchkval==rxchkval) //校验正常
{
fx->address=m_ctrl_dev.rxbuf[0];
fx->function=m_ctrl_dev.rxbuf[1];
fx->count=m_ctrl_dev.rxbuf[2];
fx->datalen=m_ctrl_dev.rxbuf[3];
if(fx->datalen)
{
fx->data=mymalloc(SRAMIN,fx->datalen); //申请内存
for(datalen=0;datalen<fx->datalen;datalen++)
{
fx->data[datalen]=m_ctrl_dev.rxbuf[4+datalen]; //拷贝数据
}
}
fx->chkval=rxchkval; //记录校验值
}else return MR_FRAME_CHECK_ERR;
return MR_OK;
}
//打包一帧数据,并发送
//fx:指向需要打包的帧
void mb_packsend_frame(m_frame_typedef *fx)
{
u16 i;
u16 calchkval=0; //计算得到的校验值
u16 framelen=0; //打包后的帧长度
u8 *sendbuf; //发送缓冲区
if(m_ctrl_dev.checkmode==M_FRAME_CHECK_CRC16)framelen=6+fx->datalen;
else framelen=5+fx->datalen;
sendbuf=mymalloc(SRAMIN,framelen); //申请内存
sendbuf[0]=fx->address;
sendbuf[1]=fx->function;
sendbuf[2]=fx->count;
sendbuf[3]=fx->datalen;
for(i=0;i<fx->datalen;i++)
{
sendbuf[4+i]=fx->data[i];
}
switch(m_ctrl_dev.checkmode)
{
case M_FRAME_CHECK_SUM: //校验和
calchkval=mc_check_sum(sendbuf,fx->datalen+4);
break;
case M_FRAME_CHECK_XOR: //异或校验
calchkval=mc_check_xor(sendbuf,fx->datalen+4);
break;
case M_FRAME_CHECK_CRC8: //CRC8校验
calchkval=mc_check_crc8(sendbuf,fx->datalen+4);
break;
case M_FRAME_CHECK_CRC16: //CRC16校验
calchkval=mc_check_crc16(sendbuf,fx->datalen+4);
break;
}
if(m_ctrl_dev.checkmode==M_FRAME_CHECK_CRC16) //如果是CRC16,则有2个字节的CRC
{
sendbuf[4+fx->datalen]=(calchkval>>8)&0XFF; //高字节在前
sendbuf[5+fx->datalen]=calchkval&0XFF; //低字节在后
}else sendbuf[4+fx->datalen]=calchkval&0XFF;
mp_send_data(sendbuf,framelen); //发送这一帧数据
myfree(SRAMIN,sendbuf); //释放内存
}
//初始化modbus
//checkmode:校验模式:0,校验和;1,异或;2,CRC8;3,CRC16
//返回值:0,成功;其他,错误代码
m_result mb_init(u8 checkmode)
{
m_ctrl_dev.rxbuf=mymalloc(SRAMIN,M_MAX_FRAME_LENGTH); //申请最大的帧接收缓存
m_ctrl_dev.rxlen=0;
m_ctrl_dev.frameok=0;
m_ctrl_dev.checkmode=checkmode;
if(m_ctrl_dev.rxbuf)return MR_OK;
else return MR_MEMORY_ERR;
}
//结束MODBUS,释放内存
void mb_destroy(void)
{
myfree(SRAMIN,m_ctrl_dev.rxbuf); //申请最大的帧接收缓存
m_ctrl_dev.rxlen=0;
m_ctrl_dev.frameok=0;
}
3.CRC校验:
#include "mcheck.h"
//MODBUS 校验检查代码
//CRC8&CRC16表
//CRC16校验 高位字节表
const u8 CRC16HiTable[]=
{
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40
};
//CRC16校验低位字节表
const u8 CRC16LoTable[]=
{
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06,
0x07, 0xC7, 0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD,
0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09,
0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A,
0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14, 0xD4,
0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3,
0xF2, 0x32, 0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4,
0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A,
0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29,
0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED,
0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60,
0x61, 0xA1, 0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67,
0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F,
0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68,
0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E,
0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,
0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71,
0x70, 0xB0, 0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92,
0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C,
0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B,
0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89, 0x4B, 0x8B,
0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,
0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42,
0x43, 0x83, 0x41, 0x81, 0x80, 0x40
};
//CRC8校验 字节表
const u8 CRC8Table[]=
{
0,94,188,226,97,63,221,131,194,156,126,32,163,253,31,65,
157,195,33,127,252,162,64,30, 95,1,227,189,62,96,130,220,
35,125,159,193,66,28,254,160,225,191,93,3,128,222,60,98,
190,224,2,92,223,129,99,61,124,34,192,158,29,67,161,255,
70,24,250,164,39,121,155,197,132,218,56,102,229,187,89,7,
219,133,103,57,186,228,6,88,25,71,165,251,120,38,196,154,
101,59,217,135,4,90,184,230,167,249,27,69,198,152,122,36,
248,166,68,26,153,199,37,123,58,100,134,216,91,5,231,185,
140,210,48,110,237,179,81,15,78,16,242,172,47,113,147,205,
17,79,173,243,112,46,204,146,211,141,111,49,178,236,14,80,
175,241,19,77,206,144,114,44,109,51,209,143,12,82,176,238,
50,108,142,208,83,13,239,177,240,174,76,18,145,207,45,115,
202,148,118,40,171,245,23,73,8,86,180,234,105,55,213,139,
87,9,235,181,54,104,138,212,149,203, 41,119,244,170,72,22,
233,183,85,11,136,214,52,106,43,117,151,201,74,20,246,168,
116,42,200,150,21,75,169,247,182,232,10,84,215,137,107,53
};
//
//使用校验和校验
//计算方式:缓冲区数据之和(按字节累加)+校验和=0
//buf:待校验缓冲区首地址
//len:要校验的长度
//返回值:校验和。
u8 mc_check_sum(u8* buf,u16 len)
{
u8 checksum=0;
while(len--)
{
checksum+=*buf++;
}
checksum=256-checksum%256;
return checksum;
}
//使用异或校验
//计算方式:校验值=缓冲区数据逐个异或
//buf:待校验缓冲区首地址
//len:要校验的长度
//返回值:异或校验结果
u8 mc_check_xor(u8* buf, u16 len)
{
u8 checkxor=0;
while(len--)
{
checkxor = checkxor^(*buf++);
}
return checkxor;
}
//使用CRC8校验
//计算方式:
//buf:待校验缓冲区首地址
//len:要校验的长度
//返回值:CRC8校验值
u8 mc_check_crc8(u8 *buf,u16 len){
u8 checkcrc8=0;
while(len--)
{
checkcrc8=CRC8Table[checkcrc8^(*buf++)];
}
return checkcrc8;
}
//使用CRC16校验
//计算方式:
//buf:待校验缓冲区首地址
//len:要校验的长度
//返回值:CRC16校验值(高字节在前,低字节在后)
u16 mc_check_crc16(u8 *buf,u16 len)
{
u8 index;
u16 check16=0;
u8 crc_low=0XFF;
u8 crc_high=0XFF;
while(len--)
{
index=crc_high^(*buf++);
crc_high=crc_low^CRC16HiTable[index];
crc_low=CRC16LoTable[index];
}
check16 +=crc_high;
check16 <<=8;
check16+=crc_low;
return check16;
}
4.Modbus数据发送:
#modbus_send_frame(&txframe); //发送一帧数据,并等待返回
#mb_packsend_frame(fx);//为modbus发送函数
//发送一帧数据
//fx:帧指针
void modbus_send_frame(m_frame_typedef * fx)
{
static u8 fcnt=0;
u8 i;
u8 res;
m_frame_typedef rxframe;
fx->address=0X01;
fx->function=0X02;
fx->count=fcnt;
fx->datalen=5;
fx->data=mymalloc(SRAMIN,5);
for(i=0;i<5;i++)
{
fx->data[i]=fcnt+i;
}
for(i=0;i<10;i++)
{
mb_packsend_frame(fx);
modbus_show_result(fx); //显示发送数据
delay_ms(50); //发送间隔
if(m_ctrl_dev.frameok) //解析应答数据
{
m_ctrl_dev.frameok=0;
res=mb_unpack_frame(&rxframe);
if(res==MR_OK) //解包成功
{
myfree(SRAMIN,rxframe.data);
if(rxframe.count==fcnt)
{
fcnt++;
break;//帧计数器和发一样,说明响应正常
}
}
}
}
myfree(SRAMIN,fx->data);
if(i==10)LED1=0;
else LED1=1;
}